This webpage is outdated since Oct 1st 2020. Please visit my new homepage for recent updates!
Bio
I am a postdoctoral research associate at Department of Computer Science, University of Oxford, working on EPSRC Programme Grant Project "ACE-OPS: From Autonomy to Cognitive assistance in Emergency OPerationS", led by Prof. Niki Trigoni, Prof. Andrew Markham, Prof. Paul Newman and Dr. Jonathan Gammell.
Before that, I did my doctoral study (2016-2020) at University of Oxford, supevised by Prof. Niki Trigoni and Prof. Andrew Markham, and my bachelor (2010-2014) at the Tongji University, China.
My research interests include Robotics, Machine Learning and Cyber-Physical Systems.
Driven by solving real-world problems, I study machine (deep) learning to process time-series sensor data for localization, mapping, navigation, and perception, in support of robots, mobile devices, self-driving vehicles and Internet of Things (IoT).
Sep 2020
Our paper "milliEgo: Single-chip mmWave Radar Aided Egomotion Estimation via Deep Sensor Fusion" was conditionally accepted to SenSys 2020.
Jul 2020
Successfully defended my doctoral thesis titled "Learning Methods for Robust Localization". Please check this
3-minutes video to overview my doctoral research.
Mar 2020
Our paper "milliMap: Robust Indoor Mapping with Low-cost mmWave Radar" was accepted to MobiSys 2020
Feb 2020
Our paper "Learning with Stochastic Guidance for Navigation" was accepted to IEEE TNNLS
Jan 2020
Two papers were accepted to ICRA 2020, and our paper "Deep Learning based Pedestrian Inertial Navigation: Methods, Dataset and On-Device Inference" was accepted to IEEE IoT-J
Dec 2019
Our paper "Deep Neural Network Based Inertial Odometry Using Low-cost Inertial Measurement Units" was accepted to IEEE TMC
Nov 2019
Received Pembroke Dean of Graduates Fund and NeurIPS ML4AD Travel Award
Nov 2019
Our paper "AtLoc: Attention Guided Camera Localization" was accepted to AAAI 2020
Jul 2019
Invited talk at Cardiff University hosted by Prof. Paul Rosin
Jul 2019
Our paper "Autonomous Learning of Speaker Identity and WiFi Geofence from Noisy Sensor Data" was accepted to IEEE IoT-J
Jun 2019
Our paper "DeepPCO: End-to-End Point Cloud Odometry through Deep Parallel Neural Network" was accepted to IROS 2019
May 2019
Received Best Paper Nominee at DCOSS 2019
Feb 2019
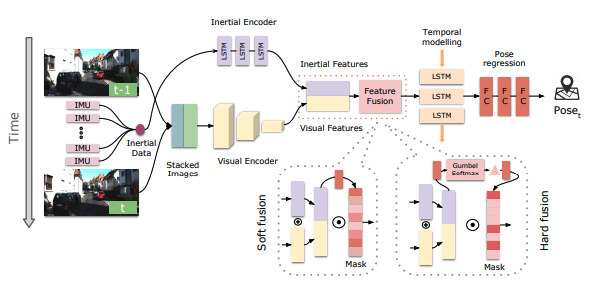
Our paper "Selective Sensor Fusion for Neural Visual-Inertial Odometry" was accepted to CVPR 2019
Jan 2019
Our paper "Autonomous Learning for Face Recognition in the Wild via Ambient Wireless Cues" was accepted to WWW 2019
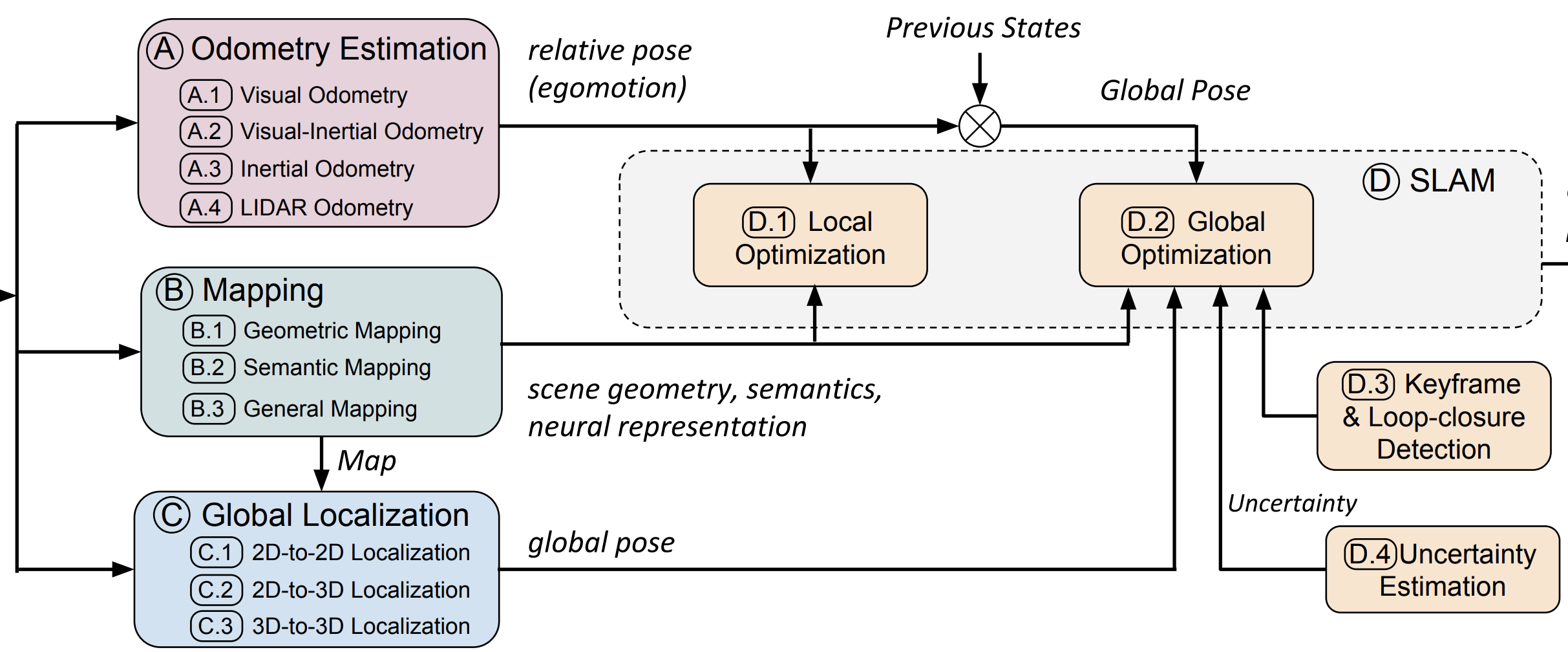
A Survey on Deep Learning for Localization and Mapping: Towards the Age of Spatial Machine Intelligence
arXiv:2006.12567
Changhao Chen, Bing Wang, Chris Xiaoxuan Lu, Niki Trigoni, Andrew Markham
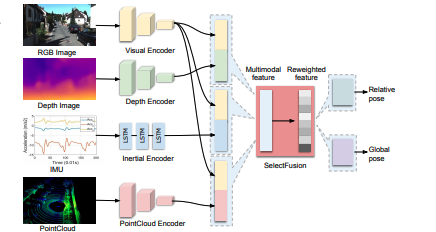
SelectFusion: A Generic Framework to Selectively Learn Multisensory Fusion
arXiv:1912.13077
Changhao Chen, Stefano Rosa, Chris Xiaoxuan Lu, Niki Trigoni, Andrew Markham
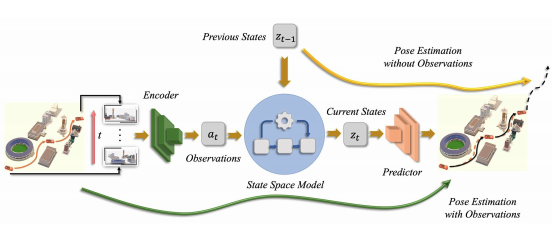
DynaNet: Neural Kalman Dynamical Model for Motion Estimation and Prediction
arXiv:1908.03918
Changhao Chen, Chris Xiaoxuan Lu, Bing Wang, Niki Trigoni, Andrew Markham
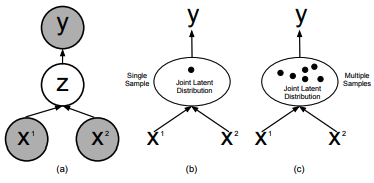
MVLoc: Multimodal Variational Geometry-Aware Learning for Visual Localization
arXiv:2003.07289
Rui Zhou, Changhao Chen, Bing Wang, Andrew Markham, Niki Trigoni
PointLoc: Deep Pose Regressor for LiDAR Point Cloud Localization
arXiv:2003.02392
Wei Wang, Bing Wang, Peijun Zhao, Changhao Chen, Ronald Clark, Bo Yang, Andrew Markham, Niki Trigoni
2020
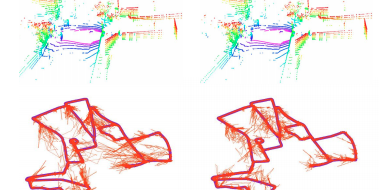
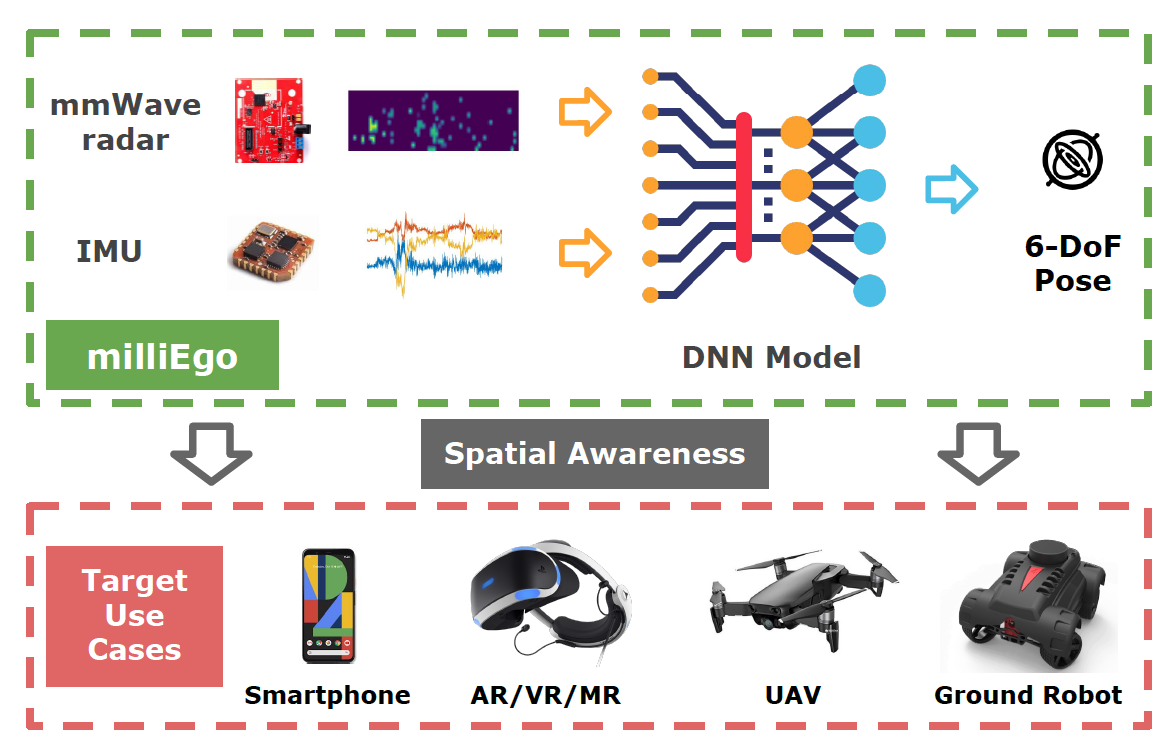
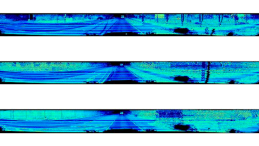
milliEgo: Single-chip mmWave Radar Aided Egomotion Estimation via Deep Sensor Fusion
SenSys-2020, The 18th ACM Conference on Embedded Networked Sensor Systems
Chris Xiaoxuan Lu, Muhamad Saputra, Peijun Zhao, Yasin Almalioglu, Pedro P. B. de Gusmao, Changhao Chen, Ke Sun, Niki Trigoni, Andrew Markham
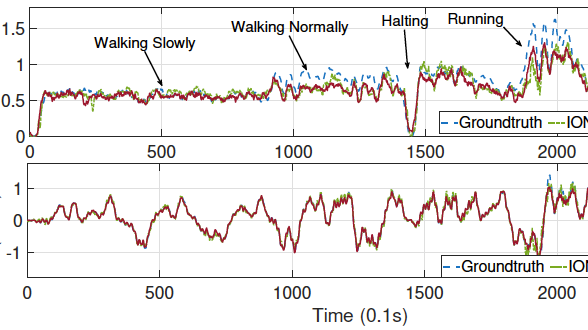
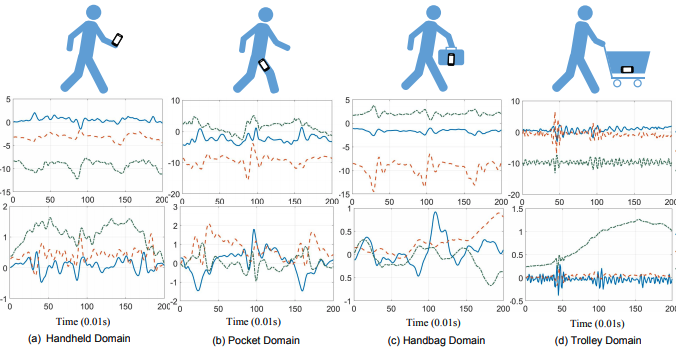
Deep Learning based Pedestrian Inertial Navigation: Methods, Dataset and On-Device Inference
IEEE Internet of Things Journal (impact factor = 9.515)
Changhao Chen*, Peijun Zhao*, Chris Xiaoxuan Lu, Wei Wang, Andrew Markham, Niki Trigoni
[PDF]
* equal contribution
AtLoc: Attention Guided Camera Localization
AAAI-2020, The 34th AAAI Conference on Artificial Intelligence
Bing Wang, Changhao Chen*, Chris Xiaoxuan Lu, Peijun Zhao, Niki Trigoni, Andrew Markham
Deep Neural Network Based Inertial Odometry Using Low-cost Inertial Measurement Units
IEEE Transactions on Mobile Computing (impact factor = 4.474)
Changhao Chen, Chris Xiaoxuan Lu, Johan Wahlstrom, Andrew Markham, Niki Trigoni
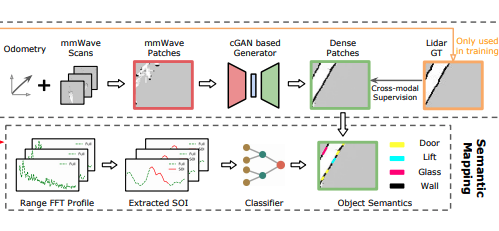
milliMap: Robust Indoor Mapping with Low-cost mmWave Radar
MobiSys-2020, The 18th ACM International Conference on Mobile Systems, Applications, and Services
Chris Xiaoxuan Lu, Stefano Rosa, Peijun Zhao, Bing Wang, Changhao Chen, Niki Trigoni, Andrew Markham
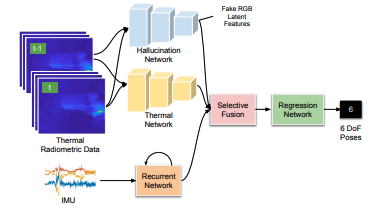
DeepTIO: A Deep Thermal-Inertial Odometry with Visual Hallucination
IEEE Robotics and Automation Letters (impact factor = 3.608)
ICRA-2020, International Conference on Robotics and Automation
Muhamad Saputra, Pedro Gusmao, Chris Xiaoxuan Lu, Yasin Almalioglu, Stefano Rosa, Changhao Chen, Johan Wahlstrom, Wei Wang, Andrew Markham, Niki Trigoni
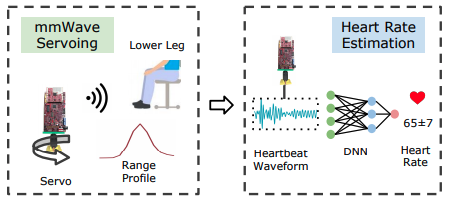
Heart Rate Sensing with a Robot Mounted mmWave Radar
ICRA-2020, International Conference on Robotics and Automation
Peijun Zhao, Chris Xiaoxuan Lu, Bing Wang, Changhao Chen, Mengyu Wang, Andrew Markham, Niki Trigoni
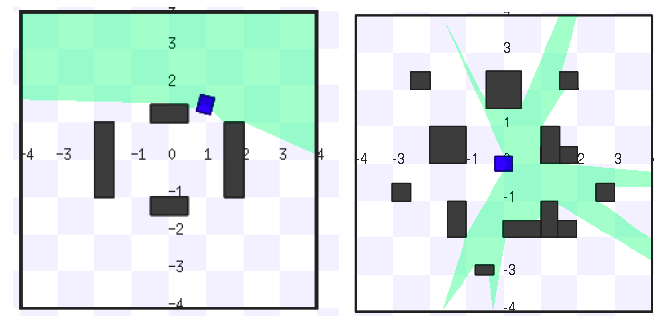
Learning with Stochastic Guidance for Robot Navigation
IEEE Transactions on Neural Networks and Learning Systems (impact factor = 11.683)
Linhai Xie, Yishu Miao, Sen Wang, Phil Blunsom, Zhihua Wang, Changhao Chen, Andrew Markham, Niki Trigoni
2019
Selective Sensor Fusion for Neural Visual-Inertial Odometry
CVPR-2019, Conference on Computer Vision and Pattern Recognition
Changhao Chen, Stefano Rosa, Yishu Miao, Chris Xiaoxuan Lu, Wei Wu, Andrew Markham, Niki Trigoni
MotionTransformer: Transferring Neural Inertial Tracking Between Domains
AAAI-2019, The 33rd AAAI Conference on Artificial Intelligence
Changhao Chen, Yishu Miao, Chris Xiaoxuan Lu, Linhai Xie, Phil Blunsom, Andrew Markham, Niki Trigoni
DeepPCO: End-to-End Point Cloud Odometry through Deep Parallel Neural Network
IROS-2019, IEEE/RSJ International Conference on Intelligent Robots and Systems
Wei Wang, Muhamad Saputra, Peijun Zhao, Pedro Gusmao, Bo Yang, Changhao Chen, Andrew Markham, Niki Trigoni
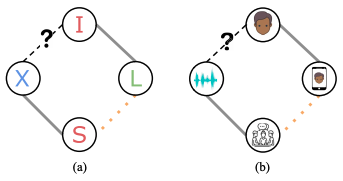
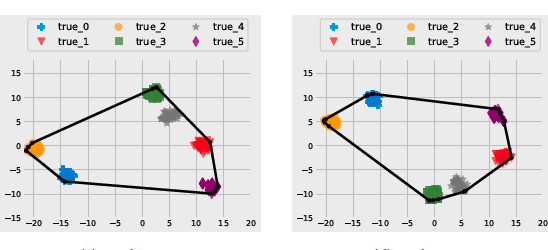
Autonomous Learning of Speaker Identity and WiFi Geofence from Noisy Sensor Data
IEEE Internet of Things Journal (impact factor = 9.515)
Chris Xiaoxuan Lu, Yuanbo Xiangli, Peijun Zhao, Changhao Chen, Niki Trigoni, Andrew Markham
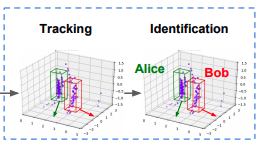
mID: Tracking and Identifying People with Millimeter Wave Radar
DCOSS-2019, International Conference on Distributed Computing in Sensor Systems
Peijun Zhao, Chris Xiaoxuan Lu, Jianan Wang, Changhao Chen, Wei Wang, Andrew Markham, Niki Trigoni
Autonomous Learning for Face Recognition in the Wild via Ambient Wireless Cues
WWW-2019, The Web Conference
Chris Xiaoxuan Lu, Xuan Kan, Bowen Du, Changhao Chen, Hongkai Wen, Andrew Markham, Niki Trigoni, John A. Stankovic
2018
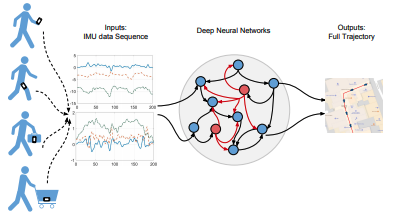
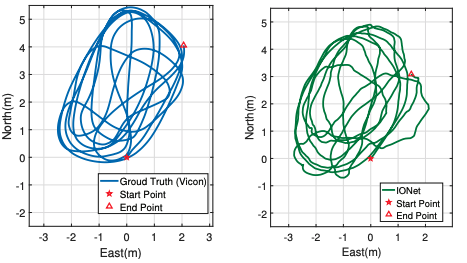
IONet: Learning to Cure the Curse of Drift in Inertial Odometry
AAAI-2018, The 32nd AAAI Conference on Artificial Intelligence
Changhao Chen, Xiaoxuan Lu, Andrew Markham, Niki Trigoni
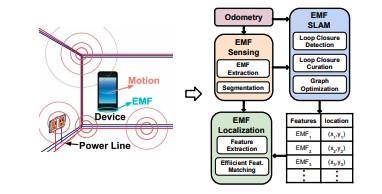
Simultaneous Localization and Mapping with Power Network Electromagnetic Field
MobiCom-2018, Annual International Conference on Mobile Computing and Networking
Chris Xiaoxuan Lu, Yang Li, Peijun Zhao, Changhao Chen, Linhai Xie, Hongkai Wen, Rui Tan, Niki Trigoni
Tightly-Coupled Integration of Inertial and Magneto-Inductive Sensors for Large-Scale Indoor Localization
Technical Report, Oxford, UK, April 2017
Changhao Chen, Andrew Markham, Niki Trigoni
Learning Methods for Robust Localization
Changhao Chen
Advised by Prof. Niki Trigoni and Prof. Andrew Markham
University of Oxford, Aug 2020
Students Mentoring
- Bing Wang (Ph.D. student, University of Oxford)
- Rui Zhou (Ph.D. student, University of Oxford)
Professional Services
- Conference Reivewer/Program Commitee
- International Conference on Robotics and Automation (ICRA)
- International Conference on Intelligent Robots and Systems (IROS)
- The Web Conference (WWW)
- Conference on Neural Information Processing Systems (NeurIPS)
- British Machine Vision Conference (BMVC)
- The International Conference on Learning Representations (ICLR)
- The AAAI Conference on Artificial Intelligence (AAAI)
- Journal Reviewer
- IEEE Transactions on Mobile Computing (TMC)
- IEEE Transactions on Neural Networks and Learning Systems (TNNLS)
- IEEE Robotics and Automation Letters (RA-L)
- IEEE Internet of Things Journal (IoT-J)
- IEEE Sensors Journal
Other Services