

Acoustic Actuated Sensor Networks for Industrial Processes (AASN4IP)
The aim of this project is to develop an underwater mobile sensor network for exploring and monitoring enclosed and cluttered underwater environments like nuclear waste storage ponds. Nuclear power provides a significant portion of our energy demands and is likely to become more wide spread with the growing world population. However, the radioactive waste generated in these power plants must be held for 60-100 years underwater in a storage pool in large metal containers. These underwater environments must be carefully monitored and controlled to avoid an environmental catastrophe. Further details on the motivation and aims of our project can be found
here. In addition to the nuclear waste storage, there is a wide range of applications that can also benefit from our underwater mobile sensor network. One of these applications is industrial scale chemical process monitoring. Generally the chemical reactions are carried out in large reaction vessels and the chemical engineers are interested in monitoring the conditions inside the reaction vessel. Our small scale mobile sensor nodes can be introduced in such vessels to provide in situ monitoring. Another interesting application is the monitoring of a network of water reservoirs and pipes in a waste water treatment plant.
The mobile sensor nodes that we envisage for these tasks are much smaller in size as compared to the traditional underwater vehicles. Our mobile sensor nodes are just 10cm in diameter and have full six degrees of freedom. This allows them to easily move in a cluttered environment. These robots are not only equipped with various sensors to sense the environment but also have ultrasound transducers for inter-node communication and range measurements. The following photograph shows one of the prototypes of our mobile sensor node.
 |
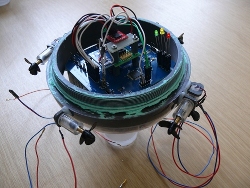 |
| Robot
Prototype (Photos from Simon Watson, University of Manchester) |
For the robots to sense and explore the storage pools, they must be able to determine their positions in these underwater environments. However, the cluttered nature of our application scenarios presents us with unique challenges. The ultrasound pulses used for performing range measurements can reflect and bounce off multiple surfaces before arriving at the the transducer. These multipath reflections introduce large positive errors in some of the estimated distances between the sensor nodes. These erroneous measurements make it very difficult to estimate the true positions of sensor nodes. As part of the AASN4IP project, we have developed two different approaches for solve these problems.
Our first approach involves a single-hop scenario where the mobile sensor nodes perform range measurements to fixed reference points or anchor nodes. These are high powered ultrasound transducers attached to the pool infrastructure or vessel walls at known coordinates. The mobile sensor nodes use the range measurements to these anchor nodes and their coordinates to estimate their own coordinates. Since some of these range measurements are erroneous, the traditional approaches that employ the least squares technique fail to provide an accurate position estimate when all the measurements are used to estimate node coordinates. We propose an algorithm based on minimizing the sum of absolute values of the residuals for these scenarios and show with real experiments that it performs significantly better than the traditional approaches. Our algorithm is independent of the underlying physical layer used to perform range measurements and thus can be used with any of the newer radio technologies e.g. UWB as well. Please see our publication for further details of this work .
Our second approach involves a multi-hop scenario where special-purpose nodes, called 'localizers', are deployed in cluttered NLOS-prone environments to help localize sensor nodes performing the monitoring task. We investigate the performance of distributed localization techniques, such as iterative localization and DV-Distance, in cluttered environments, and explore a variety of scenarios in which they outperform one-hop localization. The key observation from our initial study is that the accuracy of distributed localization techniques largely depends on the placement of localizers. This advocates the need for careful placement of localizers in a cluttered environment to minimize localization error. In our initial work, we have focused on DV-Distance, and proposed an algorithm that carefully selects where localizers should be placed to reduce the localization error of DV-Distance. Our proposed algorithms is centralized, it assumes knowledge of the clutter topology, and does not deal with the practical problem of actually moving the localizers to their selected positions. In order to address these problems, we are currently working on distributed algorithms that enable a swarm of localizers to coordinate with each other and self-deploy to provide a high-accuracy localization service for the sensor nodes. Please see our publication for further details of this work .
Selected Publications
-
Acoustic Sensor Networks for Decommissioning
T.A. York‚ P.N. Green‚ P.R. Green‚ M. Hussain‚ S. Nawaz‚ A. Phasouliotis‚ Z. Qu‚ S. Stanley‚ N. Trigoni and S. Watson
In Control & Instrumentation in Nuclear Installations (CANDI). September, 2011.
Details about Acoustic Sensor Networks for Decommissioning | BibTeX data for Acoustic Sensor Networks for Decommissioning
-
Mapping legacy storage ponds
P.N. Green‚ P.R. Green‚ M. Hussain‚ S. Narwaz‚ A. Phasouliotis‚ Z. Qu‚ N. Trigoni‚ S. Watson and T. York
In Nuclear Future. Vol. 7. No. 5. September, 2011.
Details about Mapping legacy storage ponds | BibTeX data for Mapping legacy storage ponds
-
Acoustic Sensor Networks for Decommissioning
T.A. York‚ P.N. Green‚ P.R. Green‚ A. Phasouliotis‚ Z. Qu‚ S. Watson‚ M. Hussain‚ S. Nawaz‚ N. Trigoni and S. Stanley
In Measurement and Control Vol 45‚ Issue 2‚ pp. 48 − 54. March, 2012.
Details about Acoustic Sensor Networks for Decommissioning | BibTeX data for Acoustic Sensor Networks for Decommissioning | Download Acoustic Sensor Networks for decommissioning.pdf of Acoustic Sensor Networks for Decommissioning | Download Acoustic Sensor Networks for Decommissioning.pdf of Acoustic Sensor Networks for Decommissioning | Link to Acoustic Sensor Networks for Decommissioning